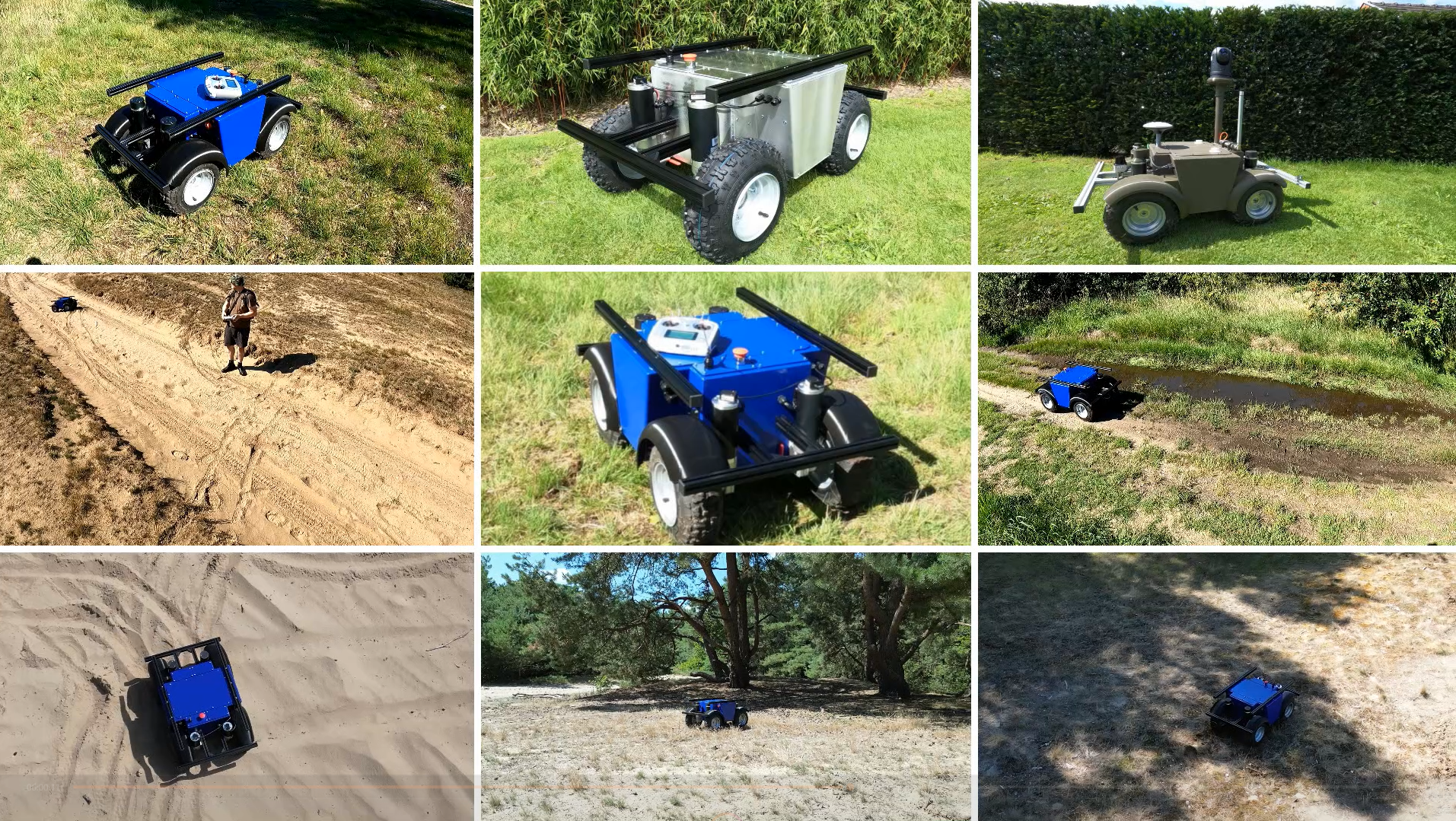
Bigbot is a mobile robot development platform which feels at home in rugged terrain like freshly plowed farmland. But also, in a business park patrolling the environment. The platform targets robotics developers who want to focus on software development and not have to worry about the hardware.
The hardware platform is provided with black anodized aluminum profiles which can carry up to 100 kg and be used to fit any kind of equipment including cameras and sensors. The four wheels together deliver 1,2 kW. This allows the platform to be used in rugged terrain, on steep slopes, and allows towing of heavy loads.
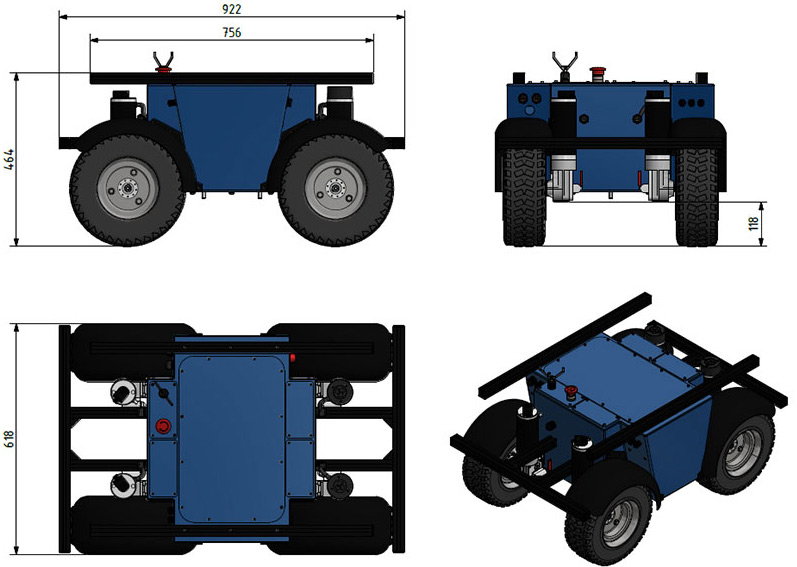
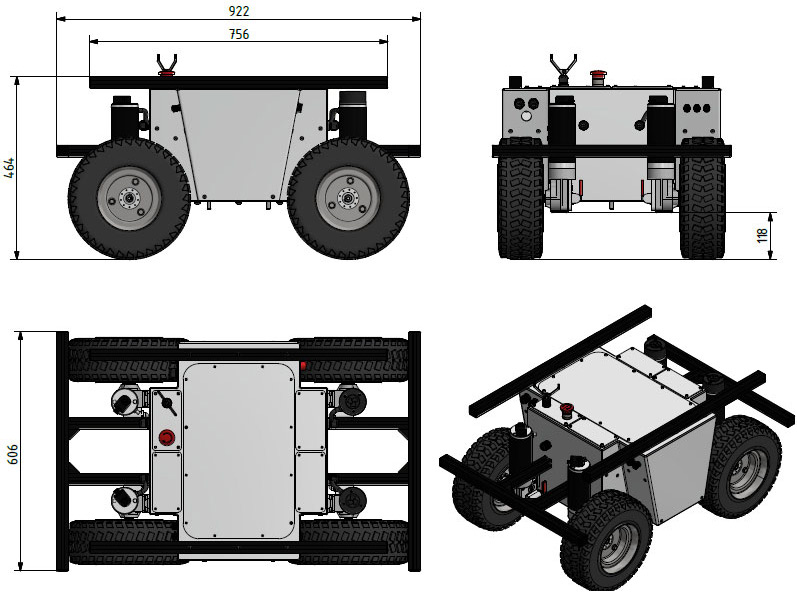
The frame is welded aluminum of 6 mm and 3 mm thick plates. A powder coating creates a strong and resilient finish which stands up to harsh weather conditions. Access to the interior of the platform is via panels on the top, which are fitted with watertight seals.
For robotics developers
Bigbot is ready for use with ROS2. Just add your own computer.
You are encouraged to pursuit your own ideas; you will be enabled to add your own navigation, localization, and path planning features. You can focus on your software and not have to worry about the hardware.
To jump-start your development already a ROS2-node is provided which reads the bigbot remote-control signals, and a node for maneuvering the platform. The most basic implementation would be to use these two nodes together to drive the platform; no additional code is required. Encoder values (odometry), drive-temperature, battery-voltage are available in ROS2.
For your convenience, a drive mode is implemented that limits the turning radius of the platform. This is useful when towing a load. This function can be selected with the remote-control.
Operation of the bigbot
Every Bigbot comes standard with a remote control that steers the bigbot out-of-the-box. The remote is equipped with an emergency stop function that switches off the motors remotely and activates the holding brakes.
The holding brakes prevent the platform from moving when the motors are not energized, even if it is on a ramp. The wheels can be manually disconnected from the motors to push the platform on and off a trailer.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}