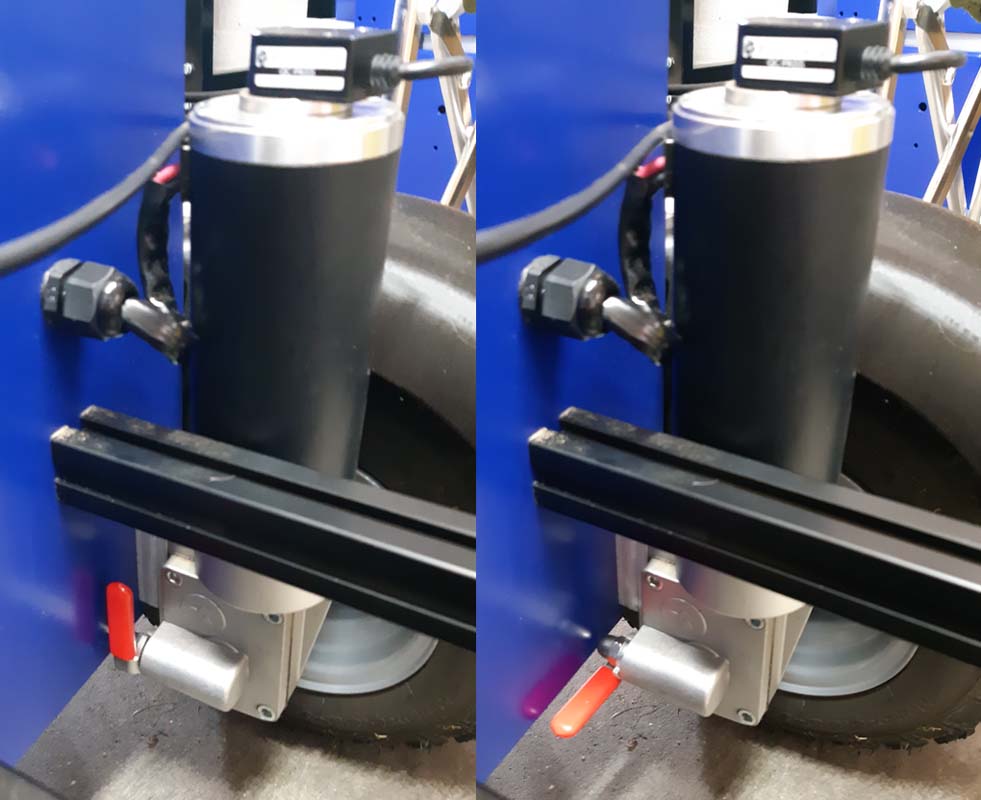
The one or two battery-packs (dependent on the order) are already mounted in the bigbot. Every pack consists of 2 x 12V (or 12.8V LiFePo) batteries connected in series. During transport the lead between the two batteries is removed so it cannot energize the robot unintentionally. You will need to re-connect this lead per battery pack to be able to operate the robot. You need an M5 wrench for this.
After connecting the batteries, please charge them completely first.
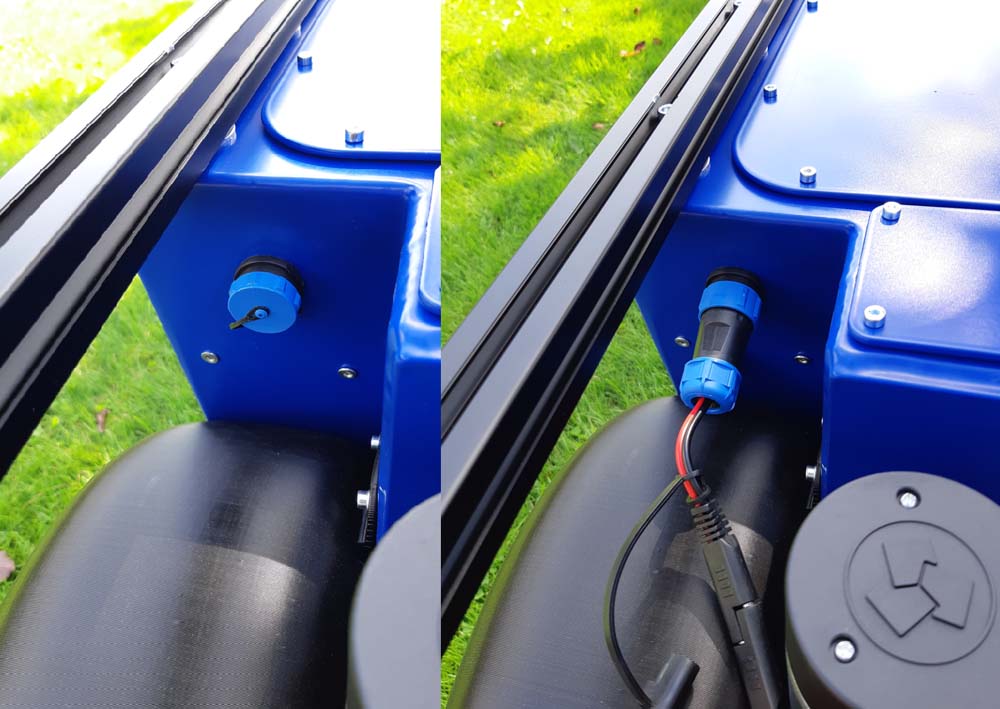
On the rear-left side a 2-pin connector is provided for charging the batteries. The provided charger will fit to this connector in one manner.
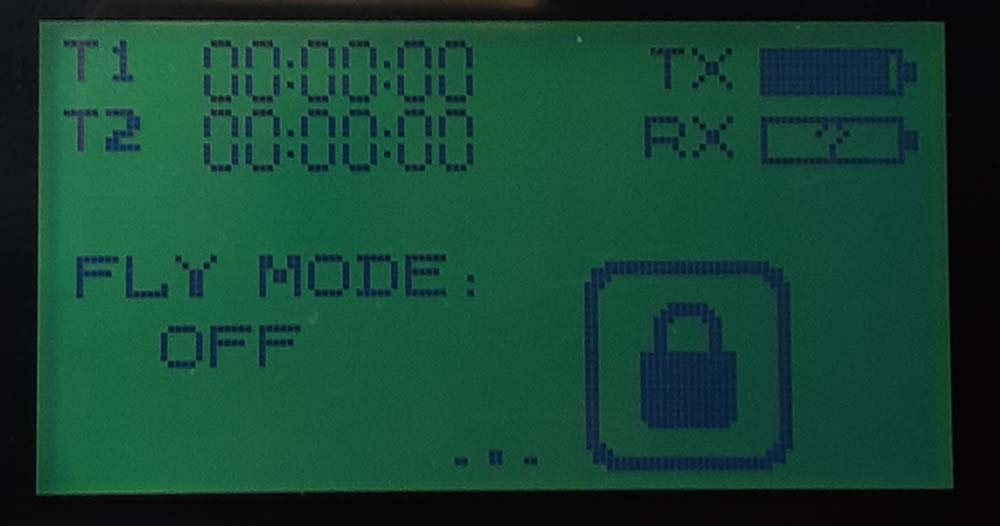
Then turn on the remote by pushing the two on-switches on the front of the remote simultaneously. You should have all switches in the up position otherwise you get a warning (see below).
When the switches are all placed up you should be paired with the bigbot automatically (binding is already done in the factory). This should be visible in the remote with a RX bar. If the bigbot not pairs a ?-sign is visible in the RX bar. In this case turn off the bigbot and the remote and check the wiring of the receiver with the roboclaw.
 The bigbot is large and powerful and can injure yourself, other people, property, or the robot itself. The following should be read and understood before operation. Keep this product away from children. It is not designed to be used by children. It should be operated by a competent and careful operator. A carefull operator limits the speed near the presence of people or objects.
The bigbot is large and powerful and can injure yourself, other people, property, or the robot itself. The following should be read and understood before operation. Keep this product away from children. It is not designed to be used by children. It should be operated by a competent and careful operator. A carefull operator limits the speed near the presence of people or objects.